




Extra Digit Sensor
Tom emailed us in advance to let us know he would be coming to commission us to make him some textile sensors for his self-made prosthesis.
Flickr set >> https://www.flickr.com/photos/plusea/albums/72157700714739734

Design Experiment:
Wrap Around Style quick prototyping


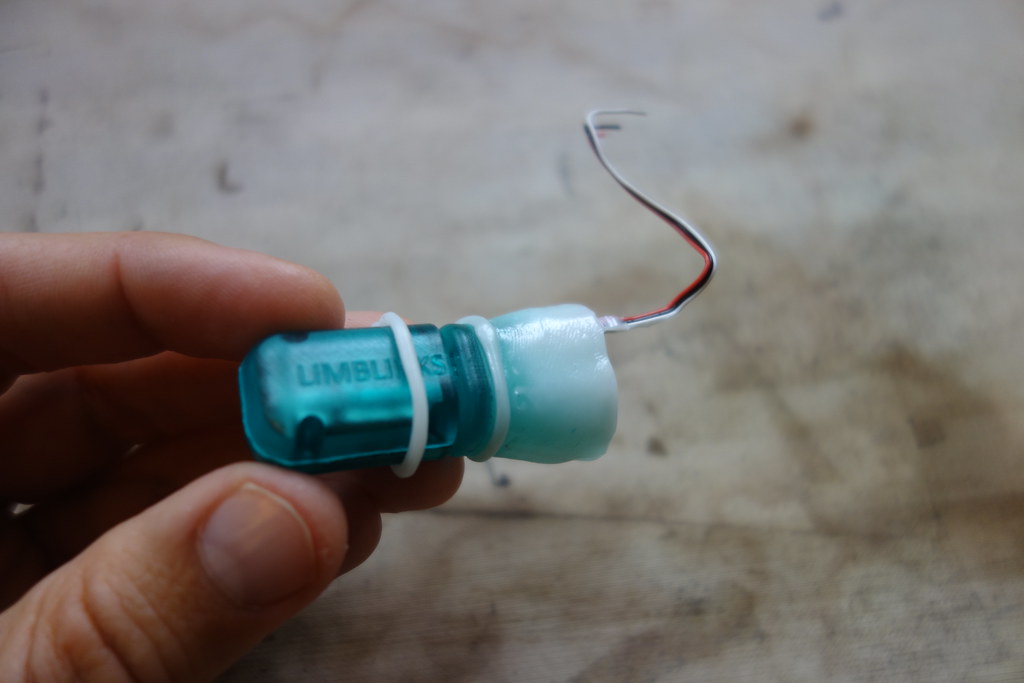
First prototype try-out



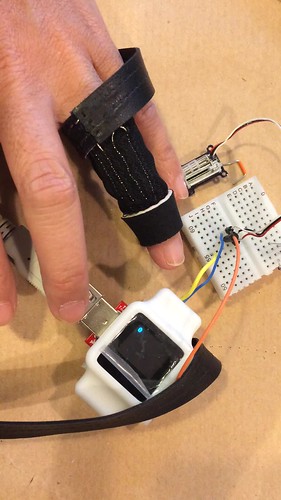
The prototype size is 55mm circumference (finger circumference is 67mm, so there are 12mm to stretch) and 50mm in total height. 3PP Body Loop material is added on the bottom to achieve fiction to the skin so it does not slip out easily.


The top of the tube is made of neoprene tube with 45mm circumference to fit to the 3D printed finger tip part at the joint connection.
470mm fabric cable (made of synthetic leather in 2 layers) is added to the 3pp Body Loop material to carry the sensor lines. The lines are made of Karl Grimm silver coated copper thread, applied as bobbin thread straight stitch, and connected to 2.54mm header. As the stitches are made with 5mm distance, it is connected to 2 of the outer pin of the header, leaving the middle pin to be NC (Not Connected).

The cable wraps around the hand in diagonal direction so it does not hang. The connection is brought to the wrist area to further connect with the Arduino Microview.
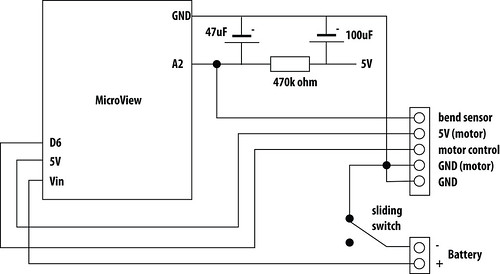
construction schematic
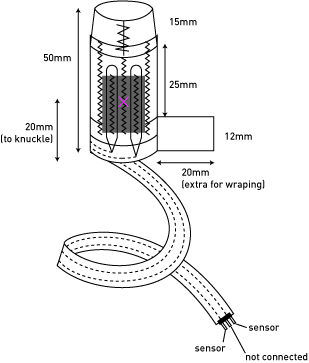
>> download construction detail PDF
Microview pinout
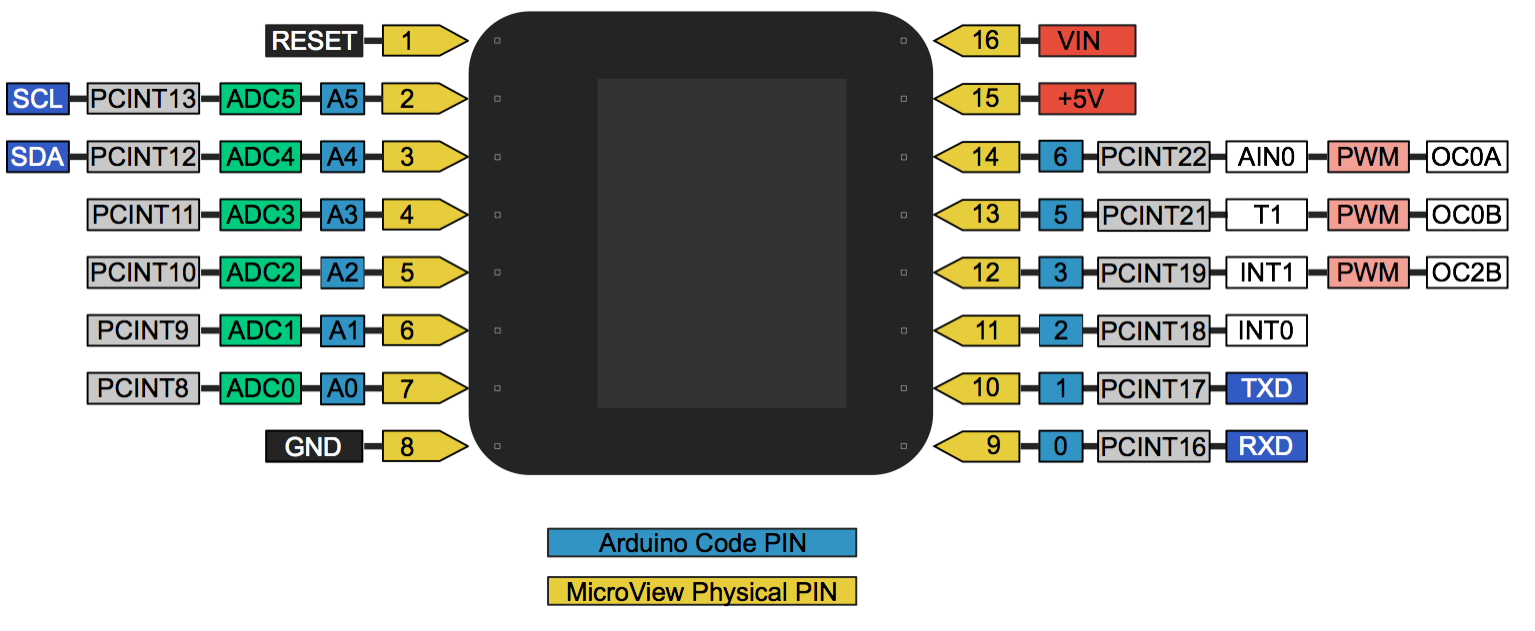



Link to the Arduino code>> https://github.com/KOBAKANT/KOBA-14-Extra_Digit
Feedback from Tom after the first prototype and our responce:
– Die Idee mit dem Strip ist genial, aber das Material muss dehnbar sein, vielleicht auch Neopren? (meine Armbandglieder sind da fast überflüssig…)
The idea with the Strip is awesome, but the material must be stretchy, maybe neoprene? (my bracelet links are almost superfluous …) (google translate)
our response:
I also thought about it, and tried it, but the stretchy makes the conductive thread stitch wavy and it will not be robust enough when you use it for long time (I think)
Also, it should be to some extent water proof/resistant.

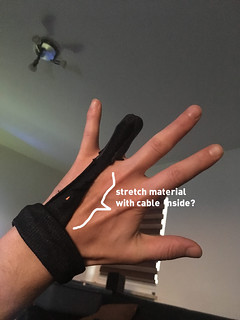
The prototype was designed to be worn like the left image with the neoprene breadboard band on the wrist (like watch) and connect the header to the breadboard, but I like the idea suggested by Tom (photo on the right)
Perhaps we can make it out of stretch material and leave loose cables inside to allow it to stretch.
– Das Neopren am Ende ist zu dick, es gehört weg. Dafür würde ich es (1,5mm Dicke) beim Rest verwenden, anstatt des Netzmaterials.
The neoprene in the end is too thick, it belongs away. For that I would use it (1.5mm thickness) with the rest, instead of the net material.(google translate)
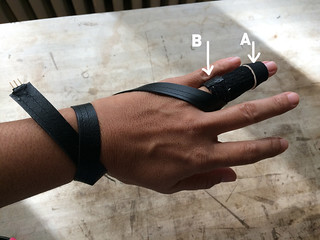
Which part is too thick? A or B part? I can change it to thinner one. but other than thickness, does the size fit well? Does this hold the 3D printed part tight enough?
Zusätzlich sollte es am Grundglied, in der Handfläche frei sein, und somit nur das Mittelglied bedeckt. (so viel Haut wie möglich)
Habe nochmal als Beispiel einen Handschuh zugeschnitten… und eine Skizze gemacht zu den Überlegungen.
In addition, it should be free at the base member, in the palm, and thus only the middle member covered. (as much skin as possible)
Have again cut a glove as an example … and a sketch made to the considerations.(google translate)
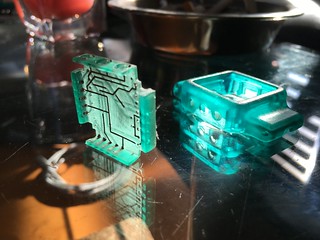
Also, the cable from the motor has to go down to the micro view. I can add tube/channel to the finger sensor base fabric. In this case, I need to know exactly where the cable from the motor will come out in your final design, so the channel is in exact place. The connection to the printed board (Tom is printing his own board with 3D printer on the photo) has to be defined so motor and sensor can directly connect to it.

Second Prototype Iteration
After getting feedback from Tom about the first prototype, we are now on the second iteration. The aim of this prototype is to make something he can wear for 1 week (or longer) to test how it is to actually wear the fabric bend sensor + 3D printed motorized finger prosthesis.
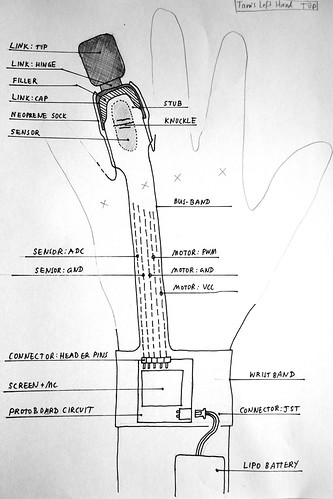
Sketch of the 2nd prototype plan
Stretch connection channel




The electrical connection between the finger and the controller unit on the wrist is made with stretch power mesh. It has 4 channels/tubes going down so conductive thread from sensor (2 connection) and cables from the motor (3 wires) can go down. we tested if this parts will get baggy as you move the hand, but it seems quite ok. This will be something to get tested in the use for 1 week.
Motor Control
Tom has already worked on finding right kind of servo motor and worked on the mechanism. We just made sure that it can be driven from the sensor we made through microview. The above video is one of the first attempt with old sensor + breadboard circuit.

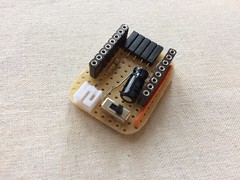


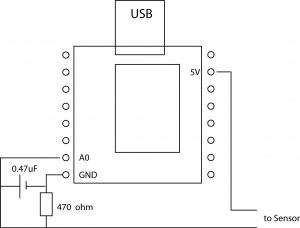
Tom has already printed a nice 3D print casing for the microview. I have cut up the original header a bit shorter so it fits to the standard header socket. Small protoboard is made with few connections to the motor and the sensor. The protoboard is then mounted on a neoprene wristband with mini lipo battery holder pocket. The plan is to power with lipo battery (3.7V, 320mAh) for this 1 week of wear test.
schematic



The sensor part is detachable. It is fixed with two plastic snaps. If this is too loose, we can permanently fix it to wrist band by sewing it down.



The hole that let the “pullie” connect to the motor was a bit too tight. and I think this was the reason for the motor to get hot and not moving smoothly once it is in the casing. I have grind it down a bit and it is now moving smoothly. also the joints are oiled with machine oil. The cable connection to motor is now made with standard 2.54mm header/socket so one can detach it. the cable order is marked with tape color in case one need to change it. For the final version, it can be solved with much smaller socket, or other types of connection (like the clip-on system Tom made) but for now we use this balky connector for secure connection.
Here is the test result
Code here >> https://github.com/KOBAKANT/KOBA-14-Extra_Digit
So, now the package is ready to be sent for the second prototype test. The package contains:
-The prototype (extra digit sensor and the wrist band)
-extra lipo battery
-lipo charger (mini USB cable required)
-microview USB programmer (for debugging)
-extra microview
-USB controller? (it was in the last package from Tom)
-clip-on system printed motor finger (Tom, if you want to also test this one…)


Now, I am going to the post and ship this to Tom!
Second Call with Tom (30/10/18)
After receiving the first prototype by mail, Tom sent us the following feedback:
Nach etwas mehr als einer Woche habe ich folgendes festgestellt:
Das Gewebe scheint ausreichend stabil. Ich konnte kein Ausleihern des Materials durch Fühlen feststellen.
Der Sitz scheint auch gut, wird aber durch die Kompression vorgetäuscht. Das Endglied rutscht vom Stumpf.
Ich könnte mir vorstellen, dass durch Versetzen des BuddyLoops vom Grundglied an das Mittelglied dies kein Problem mehr sein dürfte.
Der Sensor ist leider nicht geeignet.
Wie schon vermutet, die Max-Min-Werte ändern sich durch das Locker werden des Materials, bzw. durch Bewegung/ Verschiebung.
Der Sensor muss auch vorab sehr genau positioniert bzw. nach einiger Bewegung nachjustiert werden.
(Das könnte eventuell durch einen digital resistor behoben werden.)
Aber die Druckempfindlichkeit ist auch ein Nachteil.
Naja und das „Parkinson“ müsste auch noch behoben werden 😉
Dazu habe ich zwei für mich umsetzbare Varianten gefunden. Einmal über eine Durchschnittsberechnung und zum Zweiten durch eine Proportionalberechnung. Beides in Kombi, oder vielleicht auch ein fertiges „PID-Modul“ muss ich noch ausprobieren.
Trotzdem, es ist schon der Hammer wie sich der Finger bewegt! So wie man es erwartet… meistens jedenfalls!
Video of Tom testing the first prototype:
We just got off a call with him to clarify some of his points and also make plans for what to do next. Here are some of the questions and notes from what we discussed on the call.
KOBA QUESTIONS
KOBA: How did you wear it? every day, all day? How would you like to wear it? every day, all day?
Tom: Only wore it at home after work, because at work need to be in contact with liquids and other things that make it problematic. At first it felt like a foreign body, then became familiar. After 3rd day sensor became looser over time.
KOBA: What exactly do you want to do with this finger? Carry things, hold things?
Tom: need time to think
KOBA: What should our evaluation criteria be for this prototype?
Tom: I see this is a precursor to the final. It is a toy (Spielzeug), at the moment more debilitating than useful….. have others in mind who are more disables and who could use it more…. so for now the prototype does what he wanted, it moves when he bends his finger.
KOBA COMMENT: This makes him very happy the feeling of it moving just as he imagined.
An idea – maybe it is a toy, something to feel good about, a gadget to play with like Lego
not about the practicality, or rather the function is to have something to play with.
KOBA: Neoprene sock is slipping off the limb link? Would sewing to solve?
“Der Sitz scheint auch gut, wird aber durch die Kompression vorgetäuscht. Das Endglied rutscht vom Stumpf. Ich könnte mir vorstellen, dass durch Versetzen des BuddyLoops vom Grundglied an das Mittelglied dies kein Problem mehr sein dürfte.”
Tom: Watch the video to see what he means, one can see over time the limb-link comes loose of the neoprene sock. Idea to solve this is still to sew neoprene sock to 3D printed limb-link. Could neoprene band wrap around stump and avoid fixing on proximal flesh link all together?
KOBA: Please explain how “Druckempfindlichkeit ist auch ein Nachteil”?
Tom: When you put your hand down or relax hands on stomach one in the other….
KOBA: By “parkinson” do you mean jittering of motor?
Tom: Yes, thinks it could come from servo and sensor being on same power supply – take servo out solves this. Step-down. Sees this with other sensors too. Proportionally distribute weight (older values get more weight)…. digital pot to adjust automatically….
KOBA: Please exaplain “PID Modul” – Potential Induced Degradation (PID)?
Tom: Industry regulators…. software solution… Arduino library for temp sensor…
KOBA: What is your put on, take off scenario? Should textile be seperateable from limb link? Should the fabric be sepearteable from watch/wristband?
Tom: Sew-in vs. removeable is still open. Test sewn. He will make a prototype and send us a photo to show what he means by idea of only attaching to stump, not proximal flesh link.
KOBA: What small, standard, easy to use connectors could we use to allow you to continue to iterate limb-link with same textile? How was the header+snap solution on wrist and header-header solution on finger?
Tom: Cable is annoying, to test is okay, cable can’t be outside. Thinking to go with his idea of custom integrated connector. Put cable inside lever?
Right now is made for quick connection, could be done with screws (change once a week to wash).
physical connection = electrical connection
Header connection on wrist-band with snaps works well. Has not had to remove yet. Cover hot glue so it not visible would be nice.
KOBA COMMENT: Think about making end effector electrical connection for different gadgets. Servo data connection, same connection so that end effectors are easily interchangeable…
Ideas for physical/electrical connections:
– Lego blocks connector
– Pogo stick
– Little bits magnetic
KOBA: What is plan for wrist-band? 3D printed or Fabric?
Tom: Neoprene wrist-band is better than 3D printed wrist-band, can stay as is. But battery pouch for Lipo the hole for JST socket is too tight to get it out.
KOBA: How much wear+tear will it realistically get? Will you need to wash?
Tom: the only time he really misses this finger is when he is typing on the keyboard.
Doesn’t type 10 fingers but did use it. Now does not use it.
NEXT TEST: update software and test again
1) CALIBRATION routine to adjust range for sensor movement over time. Calibrate when turning on and whenever notice drift. Or manual adjustment of range with buttons.
2) SMOOTHING even more, this could cause delay
3) THRESHOLD analog sensor value -> trigger servo (Tom says he wants to have analog control of servo, but still worth a quick test to see how it feels)
4) CONSTRAIN servo to 10-18 angles
NEXT NEXT TEST:
Look at other sensors:
– e-textile pressure
– commercial bend sensor
REQUEST:
Please send some photos/videos of how you have been testing it? eating, cooking, holding phone, opening things….
Lego blocks connector

Spring Loaded (Pogo) Contact Connectors
>> https://www.mill-max.com/new_products/detail/12

Little bits magnetic
>> https://littlebits.com/

3rd itteration
Braiding thread connections
One of the problem Tom has pointed out is the connection between wrist band (microview is mounted on the wrist band) and the stretch sensor and motor on the finger. Thin paraschute cable (we used Paracord 100 Type I from this company >> https://www.paracord.eu/). Type I is a good size to let 1 or 2 copper conductive thread to go through.
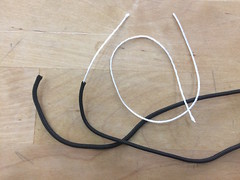

Cut the paracord in length you need. pull out the white inner core and burn the edge with lighter so it does not fray. I used thick needle to pull the conductive thread through the paracord.







